9 Minuten
Der Rover fuhr weiter. Auf eine Art und Weise alleine. An zwei Tagen im Dezember 2025 legte NASAs Perseverance mithilfe von Wegpunkten, die von künstlicher Intelligenz erzeugt wurden, 456 Meter über die Marsoberfläche zurück, ohne direkte Steuerung durch Menschen am Rad. Diese Distanz, fast anderthalb Fußballfelder, ist für ein Auto gering, für ein Fahrzeug, das über zig Millionen Kilometer leeren Raum operiert und eine Kommunikationsverzögerung von 12 bis 25 Minuten berücksichtigt, jedoch bedeutsam. Vor dem Hintergrund interplanetarer Missionen sind solche unabhängigen Fahrten wichtige Schritte, um Reichweite, Effizienz und wissenschaftlichen Ertrag zu erhöhen.
Was auf dem Mars geschah
Das Experiment verband zwei Arten von Autonomie. Die Bodenteams nutzten ein KI-System, das darauf trainiert wurde, hochauflösende Orbit-Aufnahmen und digitale Höhenmodelle zu analysieren. Die KI hatte den Auftrag, Gefahren zu identifizieren und eine Route vorzuschlagen. Die daraus resultierende Kette von Wegpunkten wurde zur Perseverance hochgeladen; die Auto-Navigation an Bord übernahm dann das eigentliche Fahren, während sie parallel neue Bilder aufnahm und sich in Echtzeit anpasste. So entstand ein Zusammenspiel zwischen bodengestützter Planung und roverinterner Entscheidungsfindung.
Dies ist nicht das erste Mal, dass ein Mars-Rover autonom fährt; Perseverance nutzt autonome Navigation bereits routinemäßig für kürzere Fahrten und Hindernisvermeidung. Neu an diesem Test war jedoch der KI-generierte Planungsschritt. Anstatt dass menschliche Operatoren auf der Erde Zwischenziele in Abständen von etwa 100 Metern festlegen, wertete die KI HiRISE-Orbitaufnahmen und Höhendaten aus, um einen zusammenhängenden, gefährliche Stellen vermeidenden Pfad zu kartieren, dem Perseverance über längere Strecken folgen konnte. Diese Art der Planung ermöglicht längere Fahrsequenzen mit weniger manuellen Eingriffen und reduziert gleichzeitig die Planungszeit am Boden.
Wie das Team das Risiko reduzierte
Jeder Test außerhalb der Erde beginnt mit Vorsicht und umfangreicher Absicherung. Bevor eine KI-generierte Route den Mars erreichte, prüften Ingenieure den Plan gegen einen terrestrischen Zwilling des Rovers: das Vehicle System Test Bed (VSTB) im Mars Yard des Jet Propulsion Laboratory (JPL). Das VSTB ist ein Engineering-Modell, das dazu dient, Probleme zu reproduzieren, Software zu validieren und neue Verfahren in einer kontrollierten Umgebung zu proben. JPL hat ähnliche Zwillinge auch für frühere Missionen, etwa Curiosity, gebaut. Solche Hardware-in-the-loop-Tests sind entscheidend, um unerwartete Wechselwirkungen zwischen Software, Steuerung und realer Mechanik zu erkennen.
Dieser Hardware-in-the-loop-Schritt gab den Operatoren Vertrauen: Die KI hatte bereits offensichtliche Gefahren ausgefiltert — Sandfallen, Geröllfelder, freiliegendes Grundgestein und felsige Ausläufer — und Wegpunkte markiert, die geschickt dazwischen hindurchführten. Nachdem diese Wegpunkte die Bodenprüfungen bestanden hatten, übernahm Perseverance auf dem Mars und führte die Fahrt über zwei Tage aus, wobei es 456 Meter (1.496 Fuß) zurücklegte, ohne dass Menschen die Räder teleoperativ steuerten. Die Kombination aus KI-Planung und bewährten Testverfahren reduzierte das Missionsrisiko deutlich.
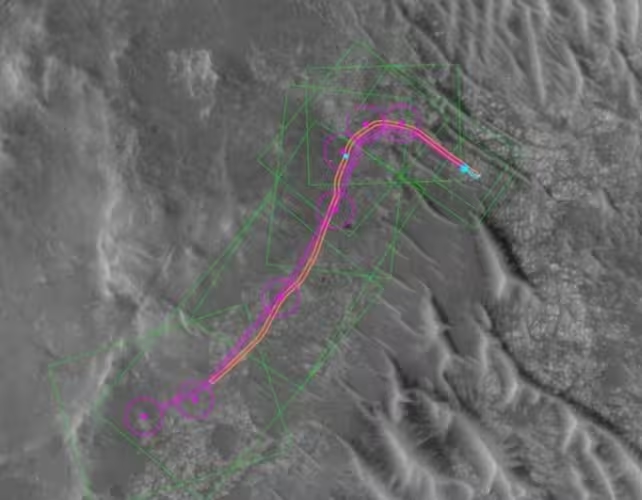
Dieses annotierte Orbitbild zeigt Perseverances Route während des zweiten autonomen Fahrtages am 10. Dezember 2025. Die magentafarbene Linie zeigt die von der KI geplante Route, die orangefarbene Linie die tatsächlich gefahrene.
Warum das wichtig ist
Die zurückgelegte Distanz ist nur ein Teil der Geschichte. Der eigentliche Fortschritt besteht darin, die Erkundung zu skalieren, während Zeitverzögerungen und begrenzte Kapazitäten der Operatoren berücksichtigt werden. Signale zu und von Mars benötigen Minuten bis Dutzende Minuten; diese Latenz zwingt Missionsteams dazu, Fahrten vorab zu planen und dem Rover zu vertrauen, dass er die Anweisungen ausführt. Je länger und komplexer die Fahrten sind, desto stärker kann die Unsicherheit des Rovers über seine exakte Position wachsen — ein Problem, das Ingenieure als Lokalisationsdrift (localization drift) bezeichnen.
Um Fahrten von Hunderten Metern auf Kilometerlängen auszuweiten, muss sich ein Rover öfter re-lokalisieren, indem er bodennahe Bilder mit Orbitalkarten abgleicht und Positionsschätzungen entsprechend anpasst. Aktuell führen Menschen noch einen großen Teil dieses Abgleichs durch, indem sie Bilder vergleichen, Potentialfelder auswerten und Korrekturen vorschlagen. KI verspricht, diesen Prozess zu beschleunigen, indem sie lernt, Bodenfotos und Orbitalaufnahmen schneller und robuster zu koppeln. Dadurch sinkt die Arbeitslast der Operatoren, und längere sowie sicherere Fahrstrecken werden möglich.
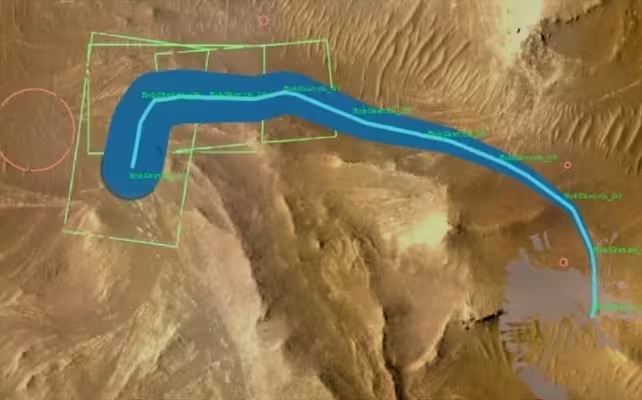
Das Blau in diesem Bild zeigt, wie die Unsicherheit über die Position des Rovers auf der Oberfläche zunimmt, je weiter er einer gegebenen Instruktionsfolge folgt.
Wissenschaftlicher und technischer Kontext
Autonome Navigation basiert auf drei Säulen: Perzeption (Gefahren und nützliche Merkmale erkennen), Lokalisation (wissen, wo sich der Rover befindet) sowie Planung und Steuerung (einen sicheren Pfad wählen und ihm folgen). Generative KI unterstützt vor allem Perzeption und Planung, indem sie große Mosaike von Orbitaufnahmen schnell einliest und interpretiert. Auf diese Weise schlägt sie Routen vor, die Gefahren umfahren und gleichzeitig wissenschaftlich interessante Gebiete bevorzugen. Dabei helfen Begriffe und Technologien wie HiRISE-Orthomosaike, digitale Höhenmodelle (DEM), semantische Segmentierung und probabilistische Risikoabschätzung.
Die onboard-Autonomie von Perseverance fügt eine zweite Ebene hinzu: Während der Rover fährt, nimmt er kontinuierlich Kamerabilder und Sensordaten auf, trifft feinmaßstäbliche Entscheidungen zur Vermeidung unmittelbarer Hindernisse und passt das Fahrverhalten an lokale Bedingungen an. Die Kombination von bodengestützter KI-Planung und roverinterner Autonomie erzeugt einen geschlossenen Regelkreis, der zukünftigen Missionen erlaubt, längere Fahrsequenzen mit weniger Uplinks zu starten und dabei Sicherheit und wissenschaftlichen Ertrag zu erhalten.
Wichtig ist: Diese Demonstration verwendete ein KI-Modell, das von Anthropic’s Claude abgeleitet wurde und in einen strengen Ingenieursworkflow integriert war. Die NASA legt Wert auf sorgfältige Validierung: Jede vorgeschlagene Route wurde gegen den Mars Yard-Zwilling geprüft und in Simulationen getestet, bevor Befehle über interplanetaren Raum gesendet wurden. Das ist bewusstes, schrittweises Voranschreiten — kein unbedachter Sprung. Solche sicherheitsorientierten Validierungsketten, kombiniert mit erklärbaren KI-Methoden und nachvollziehbaren Annahmen, sind essenziell, um Vertrauen in autonome Systeme bei Raumfahrtmissionen aufzubauen.
Wohin das führt
Erwarten Sie, dass KI in kommenden Missionen eine zunehmend größere Rolle spielt. Es gibt bereits Konzepte für Rover, die Schwärme von Drohnen absetzen können, um Gelände jenseits der Sichtlinie zu erkunden, wobei onboard-Systeme mehrere Fahrzeuge koordinieren. NASAs Dragonfly-Mission zum Saturnmond Titan, ein Rotorfluggerät, das Proben an einem komplexen, mondgroßen Ziel sammeln soll, plant ebenfalls den Einsatz autonomer Navigation und onboard Datenkuratierung, um Beobachtungen während der Flüge zwischen wissenschaftlichen Standorten zu managen.
NASA-Ingenieure sehen eine Zukunft, in der Edge-Computing und kuratierte KI-Modelle das angesammelte Urteilsvermögen von Missionsteams ins Feld tragen: intelligente Systeme, die Ziele priorisieren, ungewöhnliche Gesteinsproben für Wissenschaftler auf der Erde kennzeichnen und mehrtägige Fahrten zusammenfügen, während sie das Risiko niedrig halten. Der Nutzen ist zweifach: mehr zurückgelegte Distanz auf der Oberfläche und mehr wissenschaftlicher Output pro eingesetztem Missionsbudget. Technologien wie robuste Bild-zu-Karte-Korrespondenz, probabilistische Pfadplanung, energetische Budgetierung und Auswirkungsanalyse auf Materialien werden hier Schlüsselrollen spielen.
Expertinnen- und Experteneinschätzungen
„Diese Art von Demonstration ist der nächste logische Schritt“, sagt Dr. Elena Marconi, Planetary-Robotics-Ingenieurin mit jahrzehntelanger Feld- und Missionsarbeit. „Wir haben Maschinen beigebracht, auf unterschiedlichen Skalen zu sehen — vom Orbit bis zu Rover-Kameras — und jetzt bringen wir ihnen bei, so zu planen, dass sie menschliche Vorsicht nachahmen, aber in Maschinengeschwindigkeit arbeiten. Das Ergebnis ist ein Multiplikator für die Erforschung: intelligentere, längere Fahrten, die Wissenschaftler entlasten und ihnen erlauben, sich auf die interessantesten Entdeckungen zu konzentrieren."
Vandi Verma, eine JPL-Robotertechnikerin, die an Perseverance beteiligt ist, betont, dass generative KI Potenzial zeigt, Wahrnehmung, Lokalisation und Planung für Fahren außerhalb der Erde zu straffen. Die Exploration-Manager der NASA sehen die Anstrengung als Aufbau einer technologischen Basis für eine dauerhafte menschliche und robotische Präsenz jenseits der Erde. Wie Matt Wallace, Leiter des Exploration Systems Office am JPL, angedeutet hat, wird das Erhellen unseres Weges zum Mond und Mars intelligente Systeme erfordern, die sowohl am Boden als auch an der Peripherie (Edge) operieren.
Perseverances zweitägige, 456 Meter lange autonome Fahrt ist weder ein Ziel noch ein Gimmick. Sie stellt einen wohlüberlegten Fortschritt der Fähigkeiten dar, validiert an Engineering-Zwillingen und konservativen Verfahren. Das Experiment zeigt nicht nur, dass KI aus Orbitdaten praktikable Routen vorschlagen kann, sondern auch, dass eine gut getestete Integration von bodengestützter und roverinterner Autonomie sicher ausdehnen kann, wie weit ein Rover zwischen Uplinks fahren darf, während gleichzeitig wissenschaftlich interessante Merkmale für eine genauere Untersuchung markiert werden.
Jeder Meter auf einem anderen Planeten zählt. Mit jedem erfolgreichen autonomen Kilometer verschaffen uns unsere robotischen Entdecker mehr Zeit, um zu denken, zu planen und Entdeckungen zu machen, die zukünftige Missionen — und schließlich auch die Menschen, die ihnen ins Sonnensystem folgen werden — prägen. Dabei sind robuste Validierung, adaptive Planung und eine klare Risikostrategie die Grundlagen, um diese Technologien Schritt für Schritt in den Missionsbetrieb zu integrieren.
Quelle: sciencealert
Kommentar hinterlassen