
9 Minuten
Forscher haben gezeigt, dass Schallwellen zur Koordination von Flotten winziger Roboter genutzt werden können, die sich wie lebende Kollektive verhalten: Sie bewegen sich synchron, passen ihre Form an enge Räume an und erholen sich sogar nach Beschädigungen. Die Entdeckung — geleitet von einem Team der Penn State University und veröffentlicht in Physical Review X — eröffnet neue Wege für die Mikrorobotik in Medizin, Umweltreinigung und darüber hinaus.
Eine neue Studie unter der Leitung von Penn State-Forschenden zeigt erstmals, wie Schallwellen als Steuerungsmechanismus für mikroskopisch kleine Roboter dienen könnten. Die Untersuchung verbindet Konzepte aus Schwarmrobotik, akustischer Kommunikation und aktiver Materie und liefert fundierte Simulationsergebnisse, die als Grundlage für experimentelle Prototypen dienen können.
Warum akustische Signale für Schwarmrobotik wichtig sind
Biologische Gruppen — von Fledermäusen, die Echoortung einsetzen, bis zu Insektenschwärmen — nutzen häufig Schall, um sich zu orientieren und zu koordinieren. Inspiriert von der Natur modellierte das Forschungsteam Mikroroboter, die akustische Signale abstrahlen und detektieren, um Zusammenhalt zu wahren und als Gruppe zu steuern. Akustische Kommunikation zeichnet sich dadurch aus, dass Schall im Vergleich zu chemischen Signalen schnell übertragen wird und relativ geringe Dämpfung aufweist, wodurch sie ein effizanter Kanal zur Koordination verteilter, einfacher Geräte ist.
In den Simulationen an der Penn State hatte jeder Agent ein minimales Hardwareprofil: einen Antrieb für Bewegung, ein winziges Mikrofon und einen Lautsprecher für den Schallaustausch sowie einen Oszillator, der die Bewegung relativ zum akustischen Feld abstimmt. Trotz dieser Einfachheit erzeugte das Ensemble komplexe, emergente Verhaltensmuster — Formänderungen, Konvergenz zu starken Signalen und Wiederzusammenfinden nach Störungen — Verhaltensweisen, die sonst eher mit aufwendigeren Steuerungssystemen verbunden werden.
Die Idee, mit einfachen, energieeffizienten Transducern (Wandlern) und lokaler akustischer Rückkopplung eine robuste Schwarmintelligenz zu erzeugen, ist besonders attraktiv für Anwendungen, in denen geringes Gewicht, niedriger Energieverbrauch und Skalierbarkeit entscheidend sind. Schlüsselbegriffe in diesem Kontext sind Mikroroboter, Schwarmrobotik, akustische Steuerung und Synchronisation.
How the simulation worked: a peek under the hood
Das Team verwendete ein agentenbasiertes Computermodell, um Tausende winziger, selbstangetriebener Einheiten zu verfolgen. Jeder simulierte Mikroroboter emittierte ein periodisches akustisches Signal und maß das lokale akustische Feld, das von seinen Nachbarn erzeugt wurde. Durch die Synchronisierung seines internen Oszillators mit der dominanten lokalen Frequenz und die Bewegung in Richtung der stärksten akustischen Quelle organisierte sich die Ansammlung sehr einfacher Einheiten zu kohärenten Schwärmen.
Technisch gesehen beruht das Verhalten auf zwei einfachen Prinzipien: (1) Frequenz- oder Phasenanpassung (Synchronisation) der internen Oszillatoren und (2) gerichtete Migration entlang von Amplituden- oder Intensitätsgraden des akustischen Feldes. Diese Mechanismen sind robust gegenüber Rauschen und lokaler Heterogenität, weil sie nur lokale Messungen und sehr geringe Rechenleistung pro Einheit erfordern.
Die Simulationen berücksichtigten physikalische Effekte wie Schallausbreitung mit Dämpfung, Interferenzmuster und einfache Wechselwirkungen durch mechanische Kollisionen. Darüber hinaus evaluierten die Forschenden verschiedene Parameterbereiche für Signalstärke, Oszillatorfrequenzen und Bewegungsantworten, um die Bedingungen zu identifizieren, unter denen stabile Schwarmformationen entstehen. Diese Parameterstudien liefern wertvolle Hinweise für das Design von akustischen Wandlern und Antriebsmechanismen im Mikromaßstab.
Weil das Modell auf allgemeinen physikalischen Prinzipien und nicht auf einer proprietären Softwarearchitektur basiert, argumentieren die Forschenden, dass experimentelle Implementierungen mit vergleichbaren akustischen und mechanischen Eigenschaften die Kernphänomene reproduzieren sollten. Kurz gesagt: Kollektive Intelligenz entstand aus einfachen Bausteinen — kein zentraler Controller, keine detaillierte Umweltkarte, nur lokale, auf Schall basierende Rückkopplung.
Aus technischer Sicht bedeutet dies, dass Designer von Mikrorobotern weniger komplexe Onboard-Computing-Ressourcen benötigen könnten. Stattdessen lassen sich physikbasierte Steuerungsmechanismen wie akustische Felder und Synchronisation nutzen, um koordinierte Bewegungen und kollektives Verhalten zu erzielen. Dies kann die Produktionskosten, Energieanforderungen und Fehlerraten im Vergleich zu stark elektronisch bestückten Einheiten reduzieren.
Potential missions: from inside the body to contaminated rivers
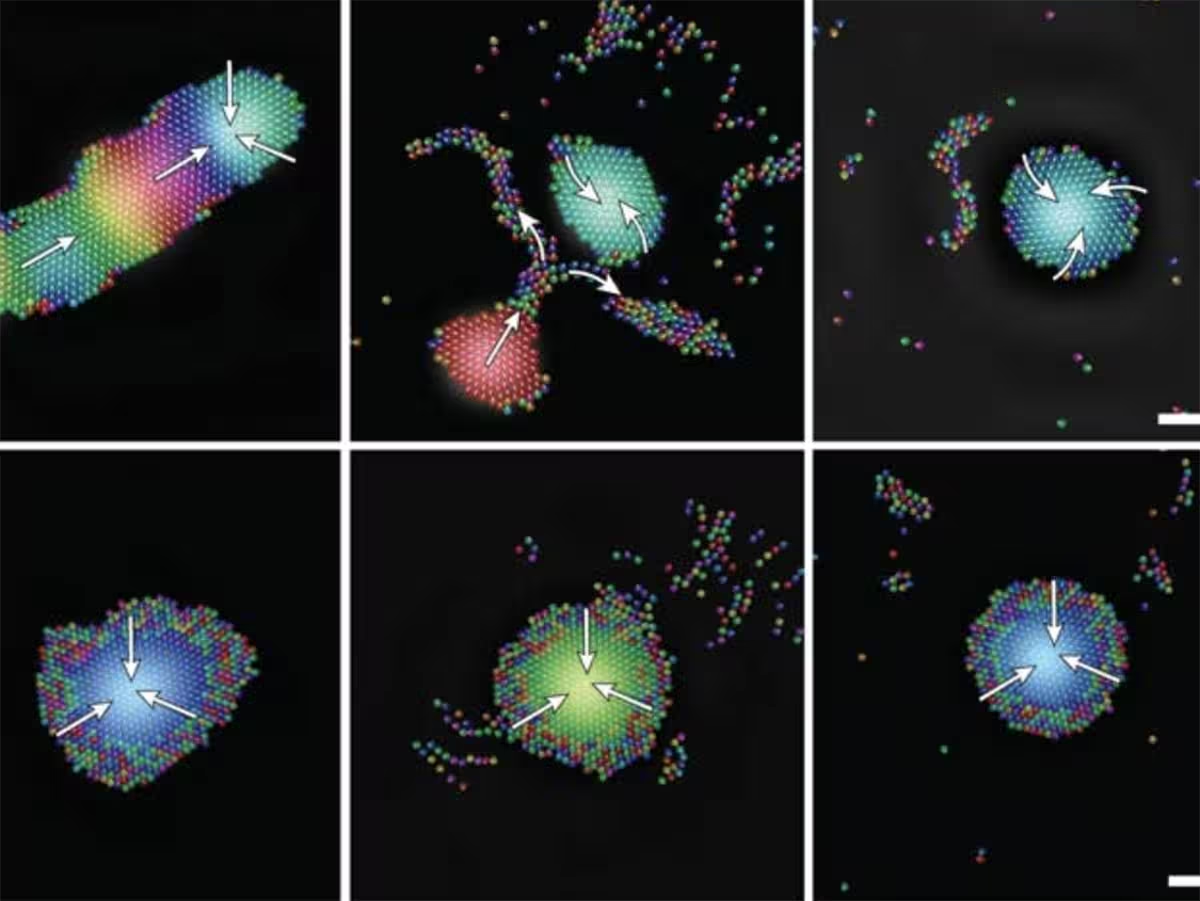
Was diese schallgesteuerten Mikroroboter besonders attraktiv macht, ist ihre Anpassungsfähigkeit. In den Simulationen schlängelten sich die Schwärme durch enge Korridore, setzten sich nach Aufspaltungen wieder zusammen und erhielten ihre Funktionalität trotz teilweiser Verluste einzelner Einheiten. Diese Art von Resilienz könnte für zahlreiche Anwendungsszenarien revolutionär sein, etwa:
- Gezielte Medikamentenfreisetzung: Flotten von Mikrorobotern könnten durch Gefäßkanäle navigieren, um Medikamente in hoher Konzentration an spezifischen Geweben abzugeben und dabei gesunde Bereiche zu schonen. Solche Anwendungen erfordern eine präzise Steuerung, biokompatible Materialien und sichere akustische Pegel.
- Umweltsanierung: Verteilte Mikroroboter könnten Schadstoffe in komplexen Umgebungen wie Sedimentschichten, porösen Medien oder verstopften Rohrleitungen lokalisieren und neutralisieren. Akustische Schwärme könnten sich selbst organisieren, um großflächige Probenahmen durchzuführen oder Katalysatoren gezielt zu verteilen.
- Suche, Rettung und Inspektion: Kleine akustische Schwärme könnten eingestürzte Gebäude, enge Industrieanlagen oder schwer zugängliche Hohlräume untersuchen, wo Menschen und größere Roboter nicht vordringen können. Die Fähigkeit, sich nach Teilverlusten neu zu formieren, erhöht die Erfolgswahrscheinlichkeit in risikoreichen Einsätzen.
Darüber hinaus sind Anwendungen in der präzisen Mikrofertigung denkbar: Schwärme könnten gemeinsam Materialien transportieren, Oberflächen behandeln oder mikroskalige Montageaufgaben übernehmen. In vielen Szenarien ist die Kombination aus akustischer Steuerung, minimaler Elektronik und physikbasierter Interaktion ein Unterscheidungsmerkmal gegenüber rein sensor- und kommunikationsgetriebenen Ansätzen.
Scientific context: active matter and emergent intelligence
Die Ergebnisse fließen in ein wachsendes Forschungsfeld mit der Bezeichnung aktive Materie ein, das untersucht, wie viele selbstgetriebene Einheiten — seien es Zellen, Bakterien oder synthetische Partikel — großskalige Muster und Funktionen erzeugen. Historisch nutzten Forschende häufig chemische Signale (Chemotaxis, Pheromone) zur Programmierung von Wechselwirkungen in aktiver Materie. Der Nachweis akustischer Kontrolle erweitert das Instrumentarium: Schall breitet sich weiter und schneller aus, und akustische Hardware kann auf kleinen Skalen extrem einfach und energieeffizient sein.
Angereichert mit Konzepten aus Nichtgleichgewichtsthermodynamik, Kollektivverhalten und Informationstheorie, bietet dieser Ansatz eine Brücke zwischen grundlegender Physik und angewandter Robotik. Indem man Synchronisationsphänomene und Feldwechselwirkungen nutzt, lassen sich komplexe kollektive Zustände stabilisieren, ohne dass jede Einheit umfassende Modelle der Umgebung oder komplexe Rechenkerne benötigt.
Laut dem Studienleiter Igor Aronson könnte dieser Ansatz Mikroroboter hervorbringen, die sowohl intelligenter als auch robuster sind, während sie interne Komplexität minimieren. Statt jede Einheit mit Prozessoren und Sensoren vollzupacken, könnten Entwickler die Physik — akustische Felder, Phasenkopplung und Synchronisation — ausnutzen, um koordinierte Verhaltensweisen in großem Maßstab zu erreichen. Das ist ein Paradigmenwechsel hin zu physikgetriebener Steuerung.
Challenges before real-world devices
Die Überführung von Simulationen in Labor- und Feldgeräte erfordert die Lösung praktischer Probleme: die Entwicklung von Emittern und Mikrofonen, die zuverlässig in der Mikroskala arbeiten, die Sicherstellung sicherer akustischer Pegel für biologische Gewebe und die Entwicklung von Materialien sowie Antriebsmechanismen, die auch in Umgebungen mit chemischen Gradienten oder turbulenten Strömungen funktionieren. Zudem müssen Forscherinnen und Forscher Steuerungsstrategien für heterogene Umgebungen entwickeln und vermeiden, dass mehrere Schwärme in räumlicher Nähe sich gegenseitig negativ stören.
Weitere technische Herausforderungen betreffen Energieversorgung und Energiemanagement: Mikroroboter benötigen langlebige, effiziente Energiequellen oder drahtlose Energiezufuhr (z. B. via induktiver Kopplung oder akustischer Energiereisektion). Ebenso sind Fertigungstechniken im Mikromaßstab entscheidend, damit die Transducer (Wandler), Aktuatoren und strukturellen Komponenten wirtschaftlich reproduzierbar sind. Schließlich spielt die Systemintegration eine Rolle: Kommunikation, Synchronisation, Navigation und Wirkstofffreisetzung müssen als zusammenhängendes System geprüft werden.
Expert Insight
Dr. Maya Patel, eine Roboteringenieurin mit Schwerpunkt Schwarmsysteme, bemerkt: "Die wahre Eleganz akustischer Koordination liegt in der Einfachheit. Man braucht keine aufwendige Rechenleistung auf jedem Knoten — lediglich die richtige Kopplung zwischen Emission, Detektion und Bewegung. Dennoch ist die Herstellung winziger, langlebiger und energieeffizienter Wandler die nächste große Herausforderung. Wenn uns das gelingt, wird die Bandbreite der Anwendungen — von gezielten Therapeutika bis hin zur Umweltüberwachung — enorm."
Patel betont zudem, dass interdisziplinäre Teams, die Expertise aus Akustik, Materialwissenschaft, Biomedizin und Robotik vereinen, der Schlüssel sind, um Prototypen zu entwickeln, die sowohl in vitro als auch in vivo getestet werden können. Sicherheits‑ und Ethikfragen müssen parallel bearbeitet werden, insbesondere für medizinische Anwendungen.
What comes next
Zukünftige Arbeiten werden wahrscheinlich Experimente mit progressiv kleineren akustischen Komponenten und realistischeren Umweltmodellen kombinieren. Cross-disziplinäre Teams — die Physiker, Ingenieure, Biologen und Materialwissenschaftler verknüpfen — sind erforderlich, um Prototypen zu bauen und deren Leistungsfähigkeit in relevanten Einsatzszenarien zu testen. Dabei sind standardisierte Versuchsprotokolle wichtig, damit Ergebnisse zwischen Forschungsteams vergleichbar bleiben.
Wenn akustische Schwärme physisch so realisierbar werden wie in den Simulationen, könnten sie einen praktischen, niedrigkomplexen Weg zu intelligenten Mikrorobotern darstellen, die kollektiv Aufgaben lösen, die einzelnen Geräten nicht möglich wären. Die Kombination aus Schwarmintelligenz, akustischer Steuerung und physikbasierter Synchronisation könnte neue Anwendungen in der Medizin (gezielte Medikamentenabgabe, minimalinvasive Eingriffe), Umwelttechnik (lokalisierte Sanierung, Messnetzwerke) und Industrie (Inspektion, Mikromontage) ermöglichen.
Insgesamt deutet die Forschung darauf hin, dass akustisch gesteuerte Mikroroboter ein skalierbares, energieeffizientes und robustes Paradigma für zukünftige Schwarmrobotik-Systeme bieten. Fortgeschrittene Simulationen, experimentelle Prototypen und technische Innovationen bei Mikro-Wandlern und Energieversorgung werden die nächsten Schritte auf dem Weg von der Theorie zur Anwendung sein. Die Integration dieser Systeme in bestehende technologische und regulatorische Rahmen bleibt eine Aufgabe, die sowohl technische als auch ethische Aspekte umfasst.
Quelle: scitechdaily
Kommentar hinterlassen