9 Minuten
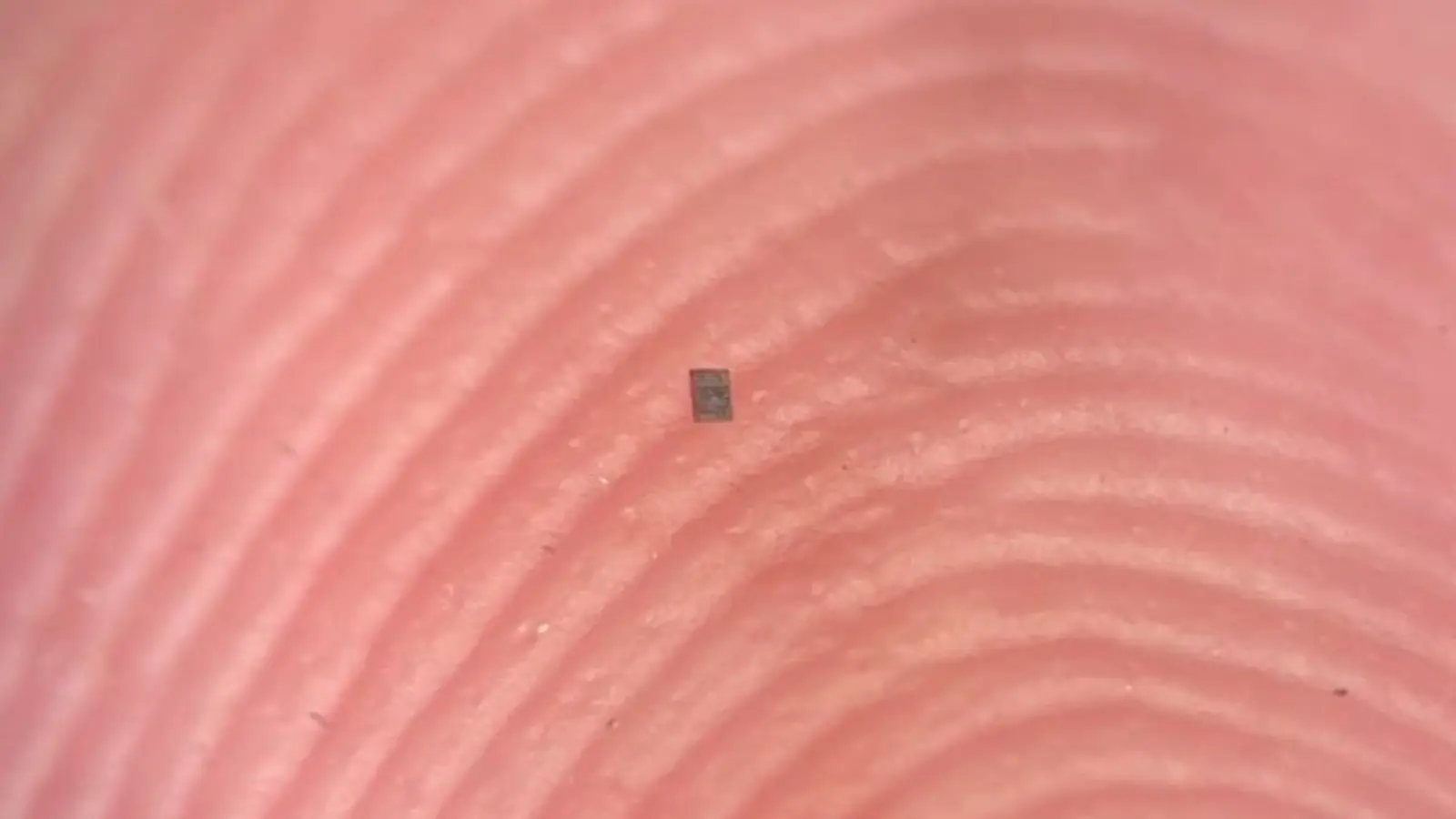
Ingenieure der University of Pennsylvania und der University of Michigan haben einen nahezu unsichtbaren, vollständig programmierbaren Mikroroboter entwickelt, der im Flüssigkeitsbad eigenständig messen, rechnen und sich fortbewegen kann. Nicht größer als ein Salzkorn und klein genug, um auf dem Grat eines Fingerabdrucks zu balancieren, markiert dieses Gerät eine dramatische Verkleinerung gegenüber früheren autonomen Roboterplattformen und eröffnet neue Möglichkeiten in der Mikrorobotik und mikrofluidischen Forschung.
How tiny is “tiny” and why that matters
Der neue Mikroroboter misst in etwa 200 mal 300 Mikrometer und ist nur 50 Mikrometer dick. Zum Vergleich: er ist kleiner als ein Sommerspross und kann auf einer Münze liegen, ohne das Prägejahr zu verdecken. Wer nicht genau hinsieht, verliert ihn leicht aus den Augen.
Die Größe ist auf Mikrometer-Ebene entscheidend, weil die physikalischen Regeln für Bewegung sich ändern. Schwerkraft und Trägheit — Faktoren, die auf menschlichen Skalen dominieren — werden vernachlässigbar. Stattdessen übernehmen viskose Kräfte und Strömungswiderstand die Kontrolle. Wie Marc Miskin, Nanorobotik-Ingenieur an der University of Pennsylvania, erklärt: Wenn man klein genug ist, "Wasser zu schieben ist, als würde man durch Teer schieben." Das Überwinden dieser fluidmechanischen Herausforderungen erforderte ein komplettes Umdenken bei Antrieb, Steuerung und Rechenarchitektur.
Auf dieser Größenskala bestimmen auch Effekte wie Oberflächenspannung, Grenzschichtdynamik und Brown'sche Bewegung das Verhalten. Entwickler müssen diese Faktoren nicht nur modellieren, sondern aktiv nutzen: Oberflächenladung, lokale elektrische Felder und mikrostrukturelle Geometrien können Bewegungsmuster beeinflussen. Damit wird die Mikrorobotik zu einem interdisziplinären Feld, das Mikroelektronik, Optik, Materialwissenschaften und Fluidmechanik verbindet.
What’s packed into a robot the size of a grain of salt
Trotz seines winzigen Volumens enthält die Plattform Prozessor, Speicher, Sensoren, Empfänger und eine Energiequelle. Jedes Exemplar ist mit winzigen Solarzellen ausgestattet, die unter LED-Beleuchtung etwa 100 Nanowatt Leistung ernten — genügend Energie für grundlegende Sensorik, Entscheidungslogik und Fortbewegung. Zusätzlich erlauben optische Empfänger die Übertragung von Programmen über Lichtsignale, sodass eine Fernprogrammierung oder Koordination möglich ist.
Der Roboter kann Temperaturmessungen der umgebenden Flüssigkeit durchführen und diese Messdaten durch patterned Motion kommunizieren, ein Verhalten, das mit dem Wackeltanz von Honigbienen verglichen wurde. Solche kodierten Bewegungsmuster ermöglichen einfache Informationsübertragungen zwischen Geräten ohne drahtgebundene Kommunikation. In Kombination mit optischer Programmierbarkeit entsteht so eine robuste Basis für kollektive Intelligenz in Schwärmen.
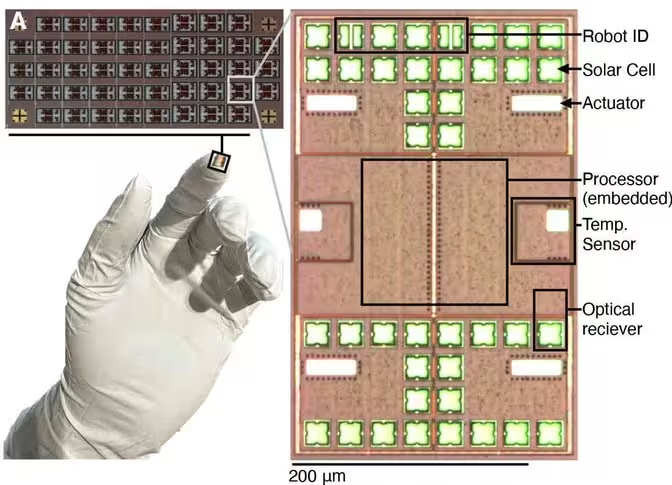
Microbots, in einem Bogen oder Blatt produziert (oben links) in etwa der Fläche eines Fingerabdrucks (unten links). Jedes Gerät enthält Solarzellen, optische Empfänger, zwei Temperatursensoren, einen Prozessor zur Informationsverarbeitung und Entscheidungsfindung, vier Aktuator-Paneele, die die Bewegung treiben, sowie vier Empfänger, die es dem Roboter ermöglichen, eingehende Programme zu erkennen.
Die Integration dieser Komponenten auf einem Substrat von wenigen hundert Mikrometern ist eine Herausforderung der Mikroproduktion. Fertigungsverfahren wie Lithographie, Dünnschichtabscheidung (CVD/PVD), Pick-and-Place auf Wafer-Ebene und selektive Materialpassivierung spielen eine zentrale Rolle. Zusätzlich müssen Materialien biokompatibel und chemisch beständig gegenüber den Zielmedien sein, falls eine Anwendung in biologischen Flüssigkeiten geplant ist.
Propulsion without moving limbs
Konventionelle Fortbewegung — kleine Gliedmaßen, Paddel oder Flossen — wird auf dieser Skala brüchig und unpraktisch. Stattdessen entwickelte das Team an der Penn einen Antrieb ohne freiliegende, bewegliche Teile. Der Mikroroboter erzeugt ein elektrisches Feld um seinen Körper, das molekulare Strömungen in der umgebenden Flüssigkeit antreibt. Das Gerät verändert effektiv das lokale Strömungsfeld: Es ist, als ob der Roboter sowohl im Fluss schwimmt als auch den Fluss aktiv zum Bewegen bringt.
Technisch beruht dieses Prinzip auf elektrokinetischen Effekten wie der elektroosmatischen Strömung oder induzierter Ladungsbewegung an Grenzflächen. Durch gezielte Sequenzen von elektrischen Feldern auf den Aktuator-Paneelen lassen sich lokale Druck- und Geschwindigkeitstensoren erzeugen, die zu gerichteter Bewegung führen. Der Vorteil ist Robustheit: keine mechanisch beanspruchten Teile, weniger Verschleiß und bessere Verlässlichkeit in korrosiven oder biologischen Umgebungen.
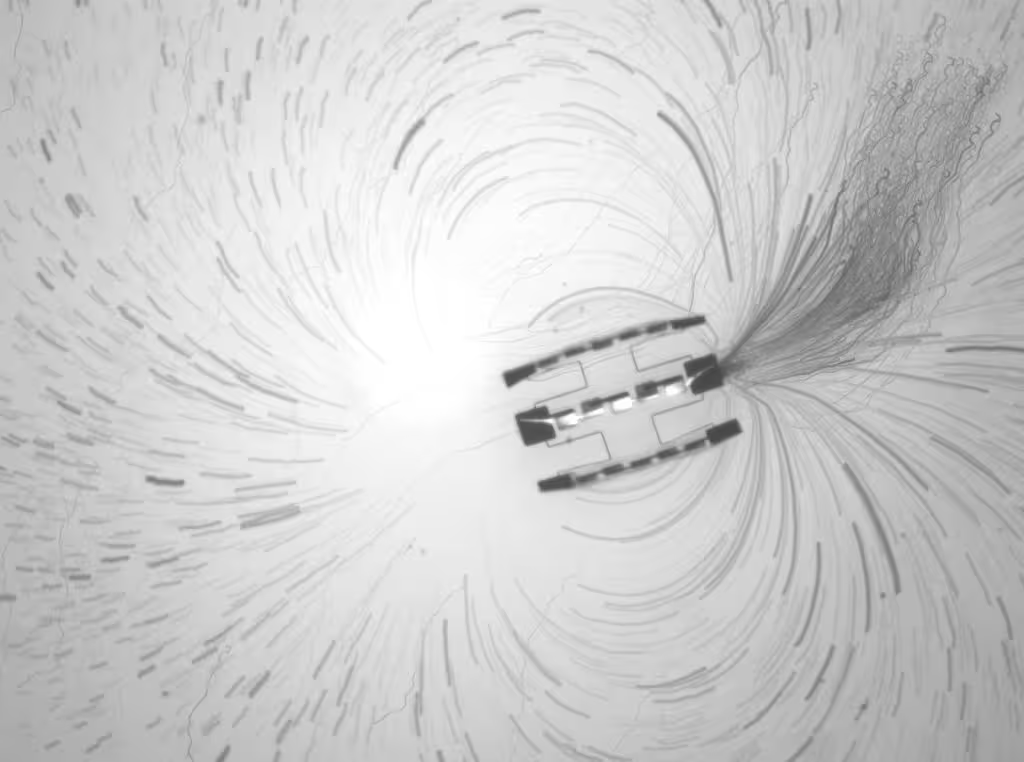
Eine projizierte Zeitrafferaufnahme der Trajektorien von Tracer-Partikeln in der Nähe eines Roboters, der aus drei miteinander verbundenen Motoren besteht. (Lucas Hanson & William Reinhardt/University of Pennsylvania)
Neben elektrophoretischen Effekten sind auch chemische Gradienten und temperaturinduzierte Konvektion potenzielle Hebel. In mikrofluidischen Systemen kann die Kombination mehrerer Antriebsmechanismen die Manövrierfähigkeit und Effizienz erhöhen. Wichtig ist, dass die Steuerung dieser Felder präzise und energieeffizient ausgelegt ist — ein entscheidender Aspekt für die Autonomie auf Nanowatt-Energieleveln.
Miniature computing: a rethink of processors and code
Ein funktionsfähiger Computer in ein derart winziges Paket zu bekommen, erforderte ein vollständiges Umdenken in Schaltungs- und Programmgestaltung. Forscher der University of Michigan entwickelten eine mikroskopische Rechnerarchitektur, die mit minimaler Energie und geringem Speicher auskommt und speziell an die Beschränkungen microrobotischer Hardware angepasst ist. David Blaauw, Informatiker im Projekt, betont, dass Team sowohl Hardware als auch Software neu entwarf, um den einzigartigen Energie- und Größengrenzen gerecht zu werden.
Die Architektur setzt auf stark optimierte Instruktionssätze, deterministische Zustandsautomaten und ereignisgesteuerte Programme, die nur bei Bedarf Rechenzyklen verbrauchen. Lokale Entscheidungen werden durch einfache heuristische Algorithmen oder Finite-State-Machines getroffen, statt durch rechenintensive Parallelprozesse. Das spart Speicher- und Rechenressourcen und reduziert den Energieverbrauch erheblich.
Da der an Bord verfügbare Speicher aktuell begrenzt ist, laufen die Mikroroboter einfache, lokal ausgeführte Programme. Diese Basisverhaltensweisen reichen jedoch für autonome Sensorik, Entscheidungsfindung und Fortbewegung aus. Zusätzlich erlauben die optischen Empfänger das Laden neuer, kompakter Programme über Lichtsignale — ein Mechanismus für Remote-Updates, Koordination und adaptives Verhalten in Schwärmen.
Auf längere Sicht sind Erweiterungen geplant: nichtflüchtiger Speicher mit höherer Dichte, energiesparsame Beschleuniger für Signalverarbeitung oder Onboard-Machine-Learning-Funktionen zur Mustererkennung in Sensordaten. Solche Verbesserungen würden die Fähigkeiten für komplexere Aufgaben wie adaptives Schwarmverhalten, lokale Kartierung und prädiktive Wartung deutlich steigern.
Collective behavior and endurance
Einzeln betrachtet ist jedes Gerät rudimentär. Im Verbund können sie jedoch synchronisieren und koordinierte Gruppen bilden, die sich wie Fischschwärme verhalten. Die Forscher zeigten, dass Schwärme dieser Mikroroboter autonom über Monate arbeiten können, wenn sie periodisch durch LED-Beleuchtung aufgeladen werden. Diese Langzeitautonomie öffnet Perspektiven für dauerhafte Überwachungsaufgaben in geschlossenen Systemen.
Kollektives Verhalten basiert auf einfachen Kommunikations- und Synchronisationsmechanismen: optische Broadcasts, Bewegungskodierungen und lokale Regelwerke, die Nachbarschaftsinformationen verarbeiten. Solche Schwarmalgorithmen können robust gegen Ausfälle einzelner Einheiten sein und erlauben verteilte Entscheidungsfindung, Redundanz und Skaleneffekte.
Die Einsatzmöglichkeiten sind vielfältig: von Umweltsensorik in porösem Boden über die Kartierung thermischer Gradienten in mikrofluidischen Chip-Experimenten bis hin zu In-situ-Inspektionen in mikrostrukturierten Fabrikaten. Besonders in schwer zugänglichen oder kontaminierten Bereichen kann ein schwarmbasiertes System Vorteile gegenüber einzelnen, großen Robotern bieten.
Scientific context and potential applications
Frühere autonome, programmierbare Mikroroboter lagen im Bereich eines Millimeters — bereits vor mehr als zwei Jahrzehnten eine technische Leistung. Die Funktionalität um den Faktor etwa 10.000 zu verkleinern erforderte Innovationen, die Optik, Mikroelektronik, Fluidmechanik und Materialwissenschaften übergreifen.
- Biomedizinische Überwachung: Mit weiterer Miniaturisierung und biokompatibler Verpackung könnten Mikroroboter eines Tages Gewebe oder Körperflüssigkeiten überwachen, um Infektionen, Entzündungen oder chemische Anomalien frühzeitig zu erkennen. Solche Anwendungen erfordern jedoch strenge Sicherheits- und Zulassungsprüfungen sowie kontrollierte Abbaubarkeit oder sichere Rückgewinnung.
- Umweltsensorik: Schwärme könnten chemische oder thermische Gradienten in mikroökologischen Umgebungen wie Bodenporen oder mikrofluidischen Systemen kartieren. Dadurch lassen sich lokale Kontaminationsherde, Nährstoffverteilungen oder Wärmeflüsse auflösen, die mit klassischen Sensoren kaum messbar wären.
- Mikroassemblierung und Inspektion: Kleine, programmierbare Geräte könnten mikrostrukturierte Bauteile inspizieren oder manipulieren, etwa in der Halbleiterfertigung oder bei der Montage von MEMS. Solche Mikroroboter könnten Bereiche erreichen, die für herkömmliche Werkzeuge unzugänglich sind.
Neben Anwendungen sind auch ethische, rechtliche und sicherheitstechnische Fragen zu adressieren: Privatsphäre bei Überwachungsaufgaben, Umweltrisiken durch Freisetzung, Langzeitstabilität und Biokompatibilität, sowie mögliche Missbrauchsszenarien. Interdisziplinäre Standards und Richtlinien sollten parallel zur technologischen Entwicklung entstehen, um verantwortungsvolle Nutzung sicherzustellen.
Expert Insight
"Das ist wirklich nur das erste Kapitel", sagt Marc Miskin. "Wir haben gezeigt, dass man ein Gehirn, einen Sensor und einen Motor in etwas packen kann, das fast zu klein ist, um es zu sehen, und es über Monate überleben und arbeiten lassen kann."
Ein ergänzender, fiktionaler aber realistischer Expertenkommentar hilft, die breitere Wirkung einzuschätzen:
Dr. Elena Ruiz, microsystems engineer
"Was diese Arbeit besonders spannend macht, ist der Systemansatz. Antrieb, Energieversorgung und Rechenleistung gemeinsam zu lösen — statt einzelne Probleme nacheinander abzuarbeiten — öffnet Fähigkeiten, die wir bisher in dieser Größenordnung nicht für möglich hielten. In den nächsten zehn Jahren könnten schrittweise Verbesserungen in Speicher, Energieerzeugung und Materialien diese Geräte von Labor-Kuriositäten zu nützlichen Werkzeugen in Medizin und Umweltwissenschaften machen."
Die Studie, die den Mikroroboter beschreibt, wurde in Science Robotics veröffentlicht. Das Team untersucht bereits Wege, den Onboard-Speicher zu erweitern und reichhaltigere Verhaltensweisen zu integrieren. Aus winzigen Hardware-Durchbrüchen können groß angelegte Möglichkeiten entstehen: Netzwerke autonomer Mikroroboter, die in Flüssigkeitsumgebungen messen, rechnen und handeln, können Bereiche von diagnostischer Medizin bis Umweltschutz nachhaltig verändern.
Zusätzlich zur Veröffentlichung werden Datensätze, Bewegungsprotokolle und Simulationsmodelle die Reproduzierbarkeit und Weiterentwicklung durch andere Forschungsteams fördern. Offene Standards für Protokolle und Testumgebungen würden die Vergleichbarkeit von Experimenten verbessern und die Translation in industrielle Anwendungen beschleunigen.
Langfristig könnten diese Mikroroboter Teil größerer, heterogener Systeme sein: Kooperierende Einheiten verschiedener Größenordnungen — von Mikrorobotern bis zu makroskopischen Drohnen — könnten Aufgaben über mehrere Skalen hinweg lösen. Solche Multi-Skalen-Systeme würden die Stärken jeder Skala nutzen: die Präzision und Zugänglichkeit der Mikroroboter kombiniert mit der Reichweite und Rechenleistung größerer Plattformen.
Schließlich erfordert der Übergang von Laborprototypen zu praktischen Anwendungen Fortschritte in der Fertigungseffizienz, Qualitätskontrolle und im Packaging. Nur durch robuste, skalierbare Produktionsprozesse werden derartige Mikroroboter ökonomisch und verlässlich genug für breite Nutzung in Forschung, Industrie und Gesundheitswesen.
Quelle: sciencealert
Kommentar hinterlassen