9 Minuten
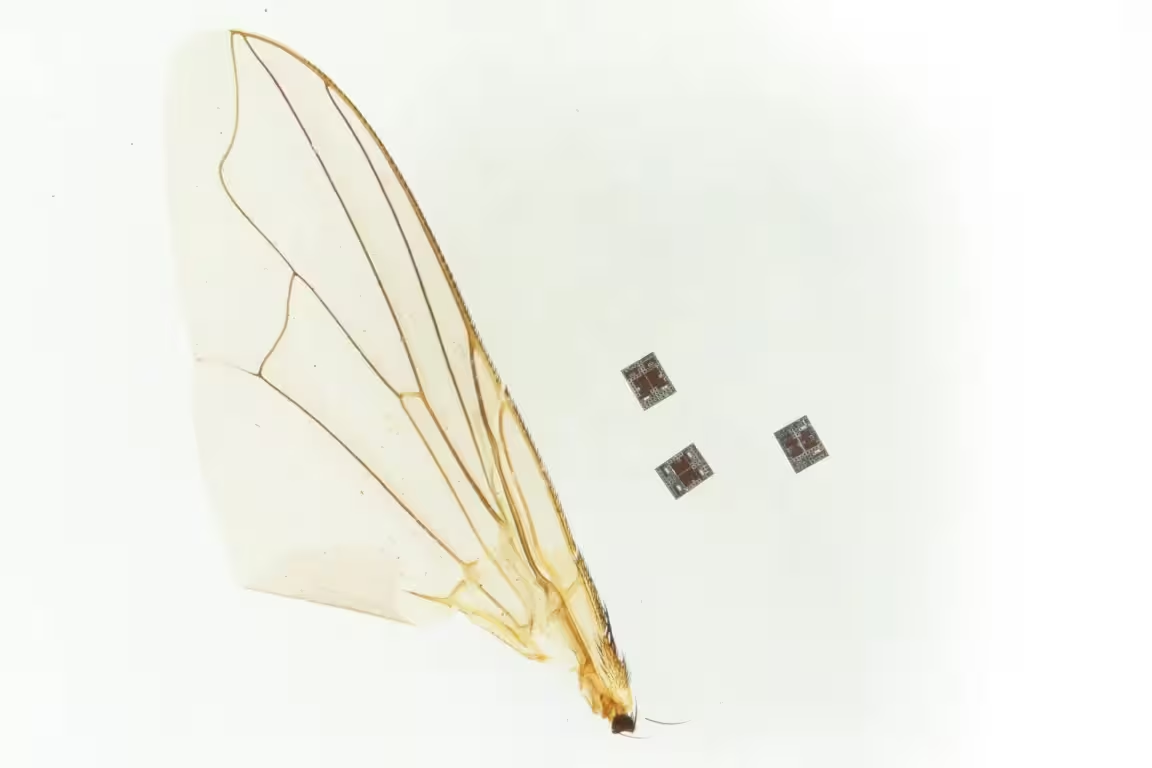
Wissenschaftler der University of Pennsylvania und der University of Michigan haben einen submillimetergroßen Roboter entwickelt, der Computer, Sensoren und Antrieb in ein Gerät integriert, das kleiner ist als ein Salzkorn. Veröffentlicht in Science und berichtet vom Washington Post, sagt das Team, dass dieser Mikroroboter den Weg zu künftigen medizinischen Werkzeugen weisen könnte, die innerhalb des menschlichen Körpers arbeiten.
Ein Mikroroboter, der wahrnehmen, denken und sich bewegen kann
Das neue Gerät befindet sich nicht im echten Nanomaßstab, ist aber mit seiner submillimetergroßen Bauweise außergewöhnlich klein: in etwa vergleichbar mit — und in einigen Dimensionen kleiner als — ein einzelnes Tafelsalz-Körnchen. Marc Miskin, Assistenzprofessor für Elektrotechnik und Systemtechnik an der Penn und Mitautor der Studie, beschrieb ihn als „den ersten sehr winzigen Roboter, der wahrnehmen, denken und handeln kann“ — eine Kombination aus integriertem Rechnen, Energieumwandlung und Bewegung in einem einzigen Paket.
Der Prototyp bleibt experimentell und ist noch nicht für den Einsatz im Menschen zugelassen. David Blaauw, Professor an der University of Michigan und Mitautor, sagte der Washington Post, dass er nicht überrascht wäre, wenn innerhalb eines Jahrzehnts praktische Anwendungen entstehen. Diese vorsichtige Zuversicht spiegelt sowohl das Potenzial als auch die technischen Hürden wider, die noch zu überwinden sind.
Die Entwicklung markiert einen wichtigen Schritt in der Miniaturisierung robotischer Systeme: Statt externe Steuersysteme oder große Schnittstellen zu benötigen, integriert der Prototyp lokale Komponenten, die es ihm erlauben, Entscheidungen in situ zu treffen. Diese lokale Autonomie kann die Grundlage für eine neue Generation medizinischer Mikroroboter bilden, die deutlich unabhängiger arbeiten als frühere, extern gesteuerte Modelle.
Wichtig ist auch die ökologische Einordnung: Die Forschung steht nicht isoliert, sondern baut auf Jahrzehnten von Fortschritten in der Mikrofertigung, der Mikroelektronik und der energiesparenden Schaltungsentwicklung auf. Kombinationen aus Mikroelektromechanischen Systemen (MEMS), Dünnfilmtechnik und modernen Halbleiterprozessen machen solche submillimetergroßen, funktionsfähigen Systeme überhaupt erst möglich.
Wie es funktioniert und warum es wichtig ist
Historisch stützten sich Mikroroboter häufig auf externe Steuerungssysteme — ferngesteuerte Magnetfelder, an eine Faser angebundene Optik oder externe Elektronik — was ihre Autonomie einschränkte, weil lokale Datenverarbeitung fehlte. Die Neuheit dieses Ansatzes liegt in der lokalen Autonomie auf Mikromaßstab: Der Roboter beherbergt einen winzigen Computer, Sensoren und einen Aktuator und verwendet miniaturisierte photovoltaische Zellen, um Energie für sowohl Rechnung als auch Antrieb zu gewinnen.
Die Kombination aus integrierter Elektronik und Energiegewinnung ermöglicht kurze, lokal gesteuerte Rechenzyklen, die einfache Entscheidungen treffen können — zum Beispiel das Erkennen von Helligkeitsänderungen, chemischen Indikatoren oder mechanischen Kontaktpunkten — und daraufhin Bewegungen auslösen. Im Unterschied zu vollständig extern gesteuerten Systemen kann ein solches Gerät in Echtzeit auf lokale Reize reagieren und so Aufgaben autonom ausführen, sofern die Rechenlogik und die Sensorik entsprechend ausgelegt sind.
Das System nutzt Photovoltaikzellen in Miniaturformat, um Licht in elektrische Energie umzuwandeln. Diese Lösung ist elegant, weil sie vorhandene Energiequellen nutzt (Licht) und konzeptionell einfache, solide Komponenten einbezieht. Gleichzeitig begrenzt Photovoltaik den Anwendungsbereich, da in vielen inneren Körperregionen nur wenig Licht verfügbar ist — ein zentrales technisches Problem, das die Forscher offen ansprechen.
Neben Energie und Sensorik sind die Aktuatoren entscheidend: Sie wandeln elektrische Signale in mechanische Bewegung um. Da der verfügbare Platz extrem begrenzt ist, kommen ausgeklügelte Materialien, Mikrostrukturen und Präzisionsfertigungstechniken zum Einsatz. In der Literatur existieren verschiedene Antriebsprinzipien für den Mikromaßstab, darunter elektrothermische, piezoelektrische oder magnetische Ansätze; der hier beschriebene Prototyp nutzt eine speziell angepasste Lösung, die mit der eingebetteten Leistungsverfügbarkeit kompatibel ist.
Materialien und Design
- Struktur: gefertigt aus Silizium mit Metallschichten, einschließlich Platin und Titan, für Elektroden und langlebige Komponenten.
- Energie: miniaturisierte Solarzellen wandeln Licht in Strom um, um den Onboard-Prozessor und das Bewegungssystem anzutreiben.
- Sensoren und Logik: kompakte Elektronik ermöglicht es dem Gerät, seine Umgebung zu erfassen und einfache Entscheidungen zu treffen, ohne kontinuierliche externe Steuerung.
Die Wahl von Materialien wie Silizium, Platin und Titan ist kein Zufall: Silizium bietet eine etablierte Plattform für die Integration von Schaltkreisen und MEMS-Strukturen; Platin und Titan liefern korrosionsbeständige, biokompatible Elektroden und Verbindungsschichten. Dünnschichttechniken und Lithographieverfahren erlauben hohe Präzision bei sehr kleinen Abmessungen, was für die Zuverlässigkeit und Reproduzierbarkeit der Bauteile entscheidend ist.
Gleichzeitig müssen Gehäuse, Oberflächenbeschichtungen und mögliche Passivierungsschichten so gestaltet sein, dass sie Biokompatibilität, Sterilisierbarkeit und mechanische Robustheit kombinieren. Forschungsarbeiten in diesem Bereich untersuchen oft zusätzliche Schichten wie Polymeren oder keramischen Beschichtungen, um Oberflächenreaktionen zu minimieren und das Risiko von Entzündungsreaktionen im Körper zu reduzieren.
Auf architektonischer Ebene besteht eine Herausforderung darin, mehrere Funktionsschichten zu stapeln — Photovoltaik, Logik, Sensorik, Aktuator — ohne dass die Gesamtgröße über kritische Grenzen hinauswächst. Das erfordert eine enge Kopplung von Mikrosystemtechnik, Halbleiterphysik und Materialwissenschaften, gekoppelt mit innovativen Fertigungsprozessen.
Im Betrieb auf Mikrometermaßstab (ein Millionstel Meter) bewegen sich diese Roboter in derselben physikalischen Domäne wie viele biologische Einheiten — Zellen, Mikrogefäße und Gewebestrukturen. Das eröffnet potenzielle biomedizinische Anwendungen wie gezielte Medikamentenabgabe, Reparatur mikroskopischer Gewebeverletzungen, lokalisierte Diagnostik oder Inspektion schwer zugänglicher Körperregionen.
Beispielsweise könnte ein Netzwerk aus autonomen Mikrorobotern in flüssigen Umgebungen wie Blut oder Lymphflüssigkeit kleine Wirkstoffmengen an spezifische Zielstrukturen abgeben, mikroinvasive Eingriffe unterstützen oder Zellmaterial für Untersuchungen transportieren. Solche Anwendungsfälle erfordern jedoch ausgefeilte Navigations- und Erkennungsalgorithmen sowie Strategien zur sicheren Entfernung oder zum biologischen Abbau der Geräte nach Abschluss ihrer Aufgabe.
Dennoch bestehen erhebliche Herausforderungen: Energieversorgung in lichtarmen inneren Umgebungen, umfassende Biokompatibilität, großskalige Fertigung und die Entwicklung sicherer Kontroll- und Rückholstrategien für den klinischen Einsatz. Auf jedem dieser Felder sind noch substanzielle Forschungs- und Entwicklungsarbeiten erforderlich.
Die Energiefrage ist besonders kritisch: Photovoltaik funktioniert gut, wenn Licht verfügbar ist, aber in vielen inneren Körperregionen ist die Beleuchtungsstärke stark eingeschränkt. Lösungen können hybride Energiequellen sein — etwa die Kombination aus Photovoltaik für oberflächennahe Regionen und anderen Energieumwandlungsmechanismen (chemische Energie, induktive Kopplung oder thermische Gradienten) für tiefere Gewebeschichten — oder die Entwicklung extrem energieeffizienter Schaltkreise und Aktuatoren, die mit minimaler Energie längere Zeit arbeiten können.
Biokompatibilität erfordert, dass Materialien und Oberflächen so konzipiert sind, dass sie keine toxischen Reaktionen hervorrufen, keine längerfristige Immunantwort provozieren und keine unerwünschten biologischen Ablagerungen fördern. Validierungsschritte umfassen standardisierte In-vitro-Tests, Tierversuche und schließlich sorgfältig überwachte klinische Studien. Parallel dazu müssen Strategien zur Sterilisierung und Verpackung für die klinische Praxis entwickelt werden.
Herstellbarkeit ist ein weiteres zentrales Thema: Viele der derzeitigen Demonstratoren entstehen in akademischen Reinräumen mit aufwändigen, teils manuellen Verfahren. Der Übergang zu industriellen Fertigungsprozessen erfordert robustere Designs, höhere Ausbeute bei der Fertigung und kosteneffiziente Montageschritte. Methoden wie Wafer-Level-Packaging, automatisierte Montage und Inline-Prüfverfahren werden wichtig sein, um eine Skalierung zu ermöglichen.
Sicherheit und Rückholbarkeit sind operationelle Anforderungen für klinische Anwendungen. Geeignete Konzepte umfassen biometrisch abbaubare Materialien, die sich nach Ablauf der Funktion zersetzen, Mechanismen zur magnetischen Anziehung und Entnahme oder programmierbare Selbstzerstörung unter kontrollierten Bedingungen. Jede Lösung muss strenge regulatorische Anforderungen erfüllen und ein hohes Maß an Zuverlässigkeit demonstrieren.
Das Forschungsteam betont, dass dieser Prototyp ein grundlegender Schritt und kein fertiges Produkt ist. Indem Sensorik, Rechenleistung und Aktuation in einem einzigen submillimetergroßen Gerät kombiniert werden, verändert die Arbeit die bisherigen Kompromisse, die Mikroroboter entweder passiv oder extern gesteuert haben sein lassen.
In den kommenden Jahren werden Ingenieure und Wissenschaftler die Energiegewinnung verbessern, die Genauigkeit der Sensorik erhöhen und geeignetere Materialien entwickeln, um vom Laborversuch zu praktischen Einsatzszenarien zu gelangen. Falls diese Entwicklungen gelingen, könnten autonome Mikroroboter eine neue Klasse medizinischer Instrumente werden — winzige Maschinen, die sich im Körper bewegen, auf lokale Bedingungen reagieren und Therapien dorthin liefern, wo herkömmliche Instrumente nicht hinkommen.
Darüber hinaus sind interdisziplinäre Kooperationen zwischen Ingenieurwissenschaften, Materialforschung, Medizin und regulatorischen Instanzen notwendig, um Sicherheitsstandards, klinische Protokolle und ethische Rahmenbedingungen zu erstellen. Solche Kooperationen verkürzen nicht nur die Zeit bis zur klinischen Anwendung, sondern erhöhen auch die Chance, robuste und patientensichere Lösungen zu realisieren.
Technisch gesehen bietet die Forschung auch Erkenntnisse für andere Anwendungsfelder: Umweltüberwachung auf Mikroebene, präzise Inspektion mikrofluidischer Systeme, Lab-on-a-Chip-Erweiterungen oder industrielle Anwendungen, die präzise, dezentrale Sensorik erfordern. Das Prinzip der lokalen Autonomie in sehr kleinen Systemen ist damit nicht nur für die Medizin relevant, sondern potenziell branchenübergreifend.
Schließlich bleiben auch Datenschutz, Verantwortlichkeit und ethische Fragen offen: Wer trägt die Verantwortung, wenn autonome Mikroroboter in vivo Entscheidungen treffen? Welche Daten werden erfasst, wie werden sie geschützt und wer bestimmt ihre Nutzung? Solche Fragen müssen parallel zur technischen Entwicklung adressiert werden, um Vertrauen bei Anwendern und Patienten zu schaffen.
Zusammenfassend ist der beschriebene submillimetergroße Mikroroboter ein bedeutender Fortschritt in Richtung autonomer, eingebetteter medizinischer Systeme. Die Kombination aus Miniaturrechner, Sensorik und Energieerzeugung in einem so kleinen Paket ist technisch beeindruckend und öffnet zahlreiche Forschungspfade. Der Weg zur klinischen Anwendung ist allerdings noch lang und erfordert Lösungen für Energieversorgung, Biokompatibilität, Fertigung und Regulierung, bevor solche Geräte routinemäßig in der Medizin eingesetzt werden können.
Quelle: smarti
Kommentar hinterlassen